在开始之前,请现配置好基本的环境,请你先完成下面博客中的qemu和busybox部分
编译x86_64 linux并运行在qemu上
因为内核需要添加系统调用,我们需要重新编译。
本实验均在ubuntu 22.04下进行,编译的内核版本是5.19(低版本内核会在添加系统调用时略有不同)。
添加系统调用
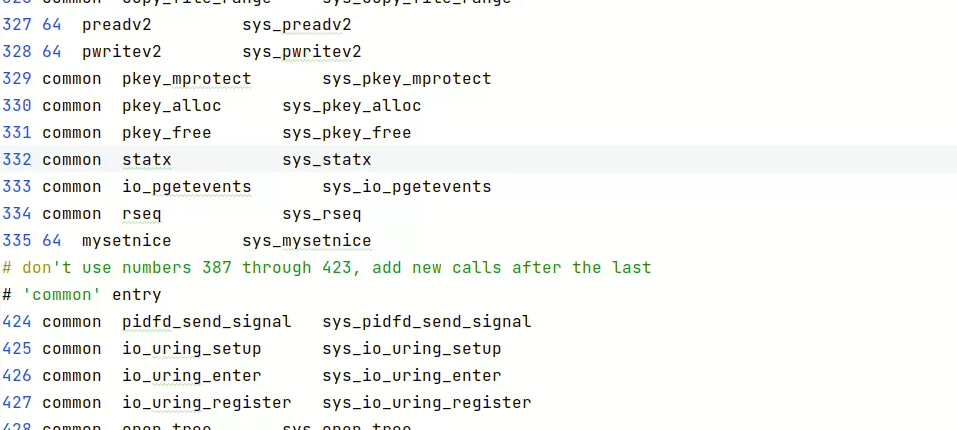
linux-5.19/arch/x86/entry/syscalls/syscall_64.tbl
添加
1
| 335 64 mysetnice sys_mysetnice
|
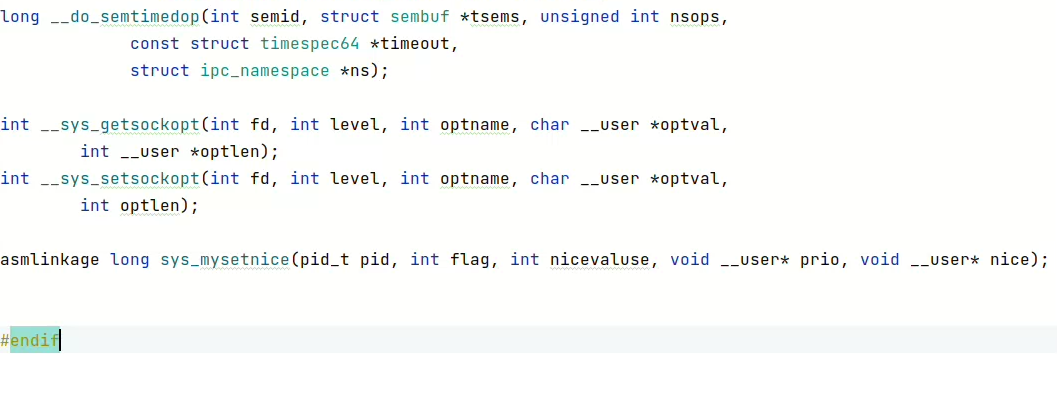
linux-5.19/include/linux/syscalls.h
添加
1
| asmlinkage long sys_mysetnice(pid_t pid, int flag, int nicevaluse, void __user* prio, void __user* nice);
|
linux-5.19/kernel/sys.c
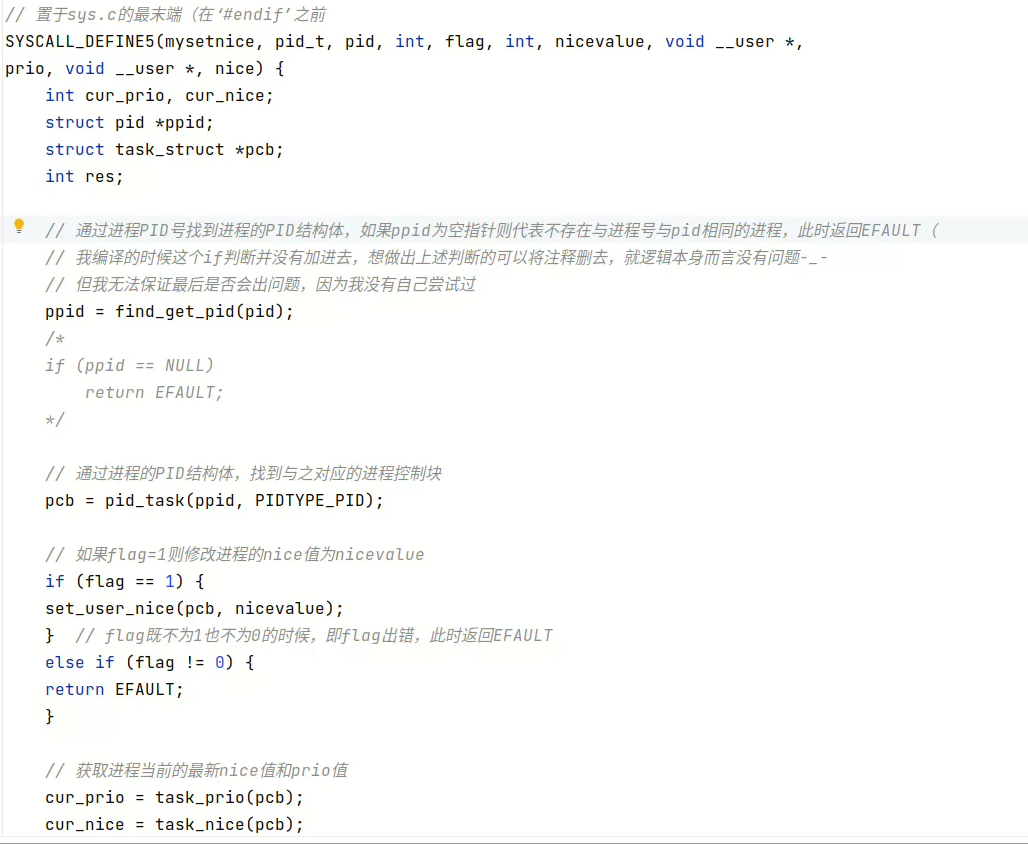
在最后一个#endif前加上下面的代码
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
|
SYSCALL_DEFINE5(mysetnice, pid_t, pid, int, flag, int, nicevalue, void __user *,
prio, void __user *, nice) {
int cur_prio, cur_nice;
struct pid *ppid;
struct task_struct *pcb;
int res;
ppid = find_get_pid(pid);
pcb = pid_task(ppid, PIDTYPE_PID);
if (flag == 1) {
set_user_nice(pcb, nicevalue);
}
else if (flag != 0) {
return EFAULT;
}
cur_prio = task_prio(pcb);
cur_nice = task_nice(pcb);
res = copy_to_user(prio, &cur_prio, sizeof(cur_prio));
res = copy_to_user(nice, &cur_nice, sizeof(cur_nice));
return 0;
}
|
编译内核
内核的编译步骤与编译x86_64 linux并运行在qemu上的编译步骤相同,不予介绍。
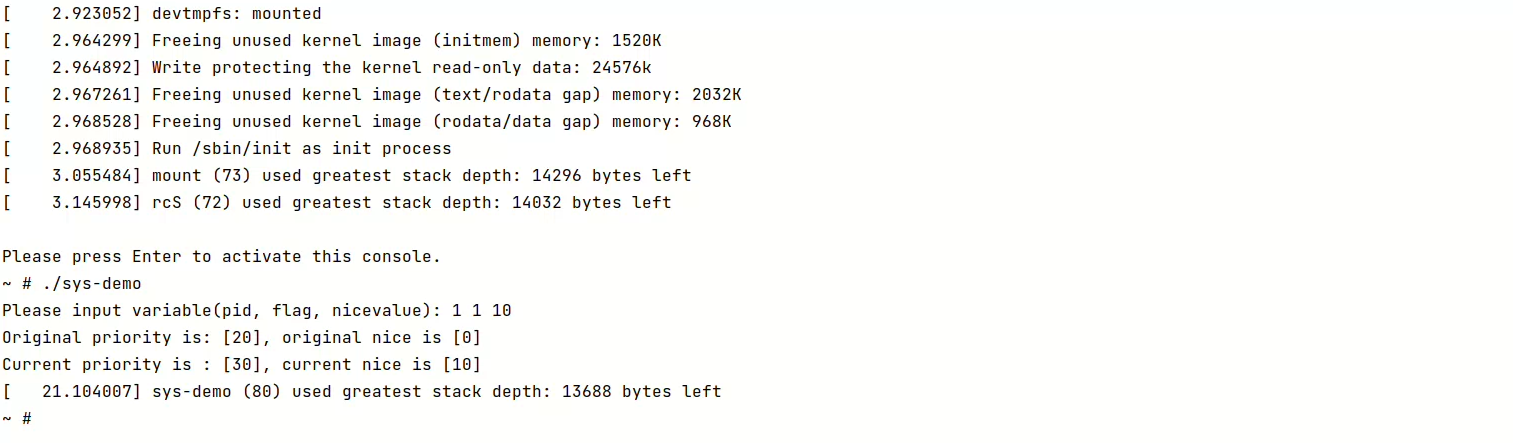
测试添加的系统调用
qemu请务必使用带动态链接库的根文件系统
1
2
3
| $ sudo mount rootfs-lib.img rootfs-lib
$ cd rootfs-lib
$ sudo vim sys-demo.c
|
内容如下:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
| #include "unistd.h"
#include "sys/syscall.h"
#include "stdio.h"
#define _SYSCALL_MYSETNICE_ 335
#define EFALUT 14
int main()
{
int pid, flag, nicevalue;
int prev_prio, prev_nice, cur_prio, cur_nice;
int result;
printf("Please input variable(pid, flag, nicevalue): ");
scanf("%d%d%d", &pid, &flag, &nicevalue);
result = syscall(_SYSCALL_MYSETNICE_, pid, 0, nicevalue, &prev_prio,
&prev_nice);
if (result == EFALUT)
{
printf("ERROR!");
return 1;
}
if (flag == 1)
{
syscall(_SYSCALL_MYSETNICE_, pid, 1, nicevalue, &cur_prio, &cur_nice);
printf("Original priority is: [%d], original nice is [%d]\n", prev_prio,
prev_nice);
printf("Current priority is : [%d], current nice is [%d]\n", cur_prio,
cur_nice);
}
else if (flag == 0)
{
printf("Current priority is : [%d], current nice is [%d]\n", prev_prio,
prev_nice);
}
return 0;
}
|
1
2
3
| $ sudo gcc sys-demo.c -o sys-demo
$ cd ..
$ qemu-system-x86_64 -kernel linux-5.19/arch/x86/boot/bzImage -boot c -m 2048M -hda rootfs-lib.img -append "root=/dev/sda rw console=ttyS0,115200 acpi=off nokaslr" -serial stdio -display none
|
启动qemu之后启动sys-demo即可